

2024.08.08
朴津行业应用 | 能说会导,智慧引导服务方案



这样的机器人,你见过吗?


上篇文章小编带领大家一起了解了机器人的起源、发展、定义、组成。在当今科技飞速发展的时代,机器人已经成为我们生活中不可或缺的一部分,它们形态各异、功能多样,活跃在各个行业和领域,有着广阔的发展空间与应用前景,朝着智能化和多样化方向发展。关于越来越多的机器人该如何分类,目前国际上没有制定统一的标准,有的按智能程度分,有的按控制方式分,有的按结构分,有的按应用领域分。今天带大家一起了解下机器人常见的分类方式,看看有哪些是大家所熟悉的吧。 应用领域分类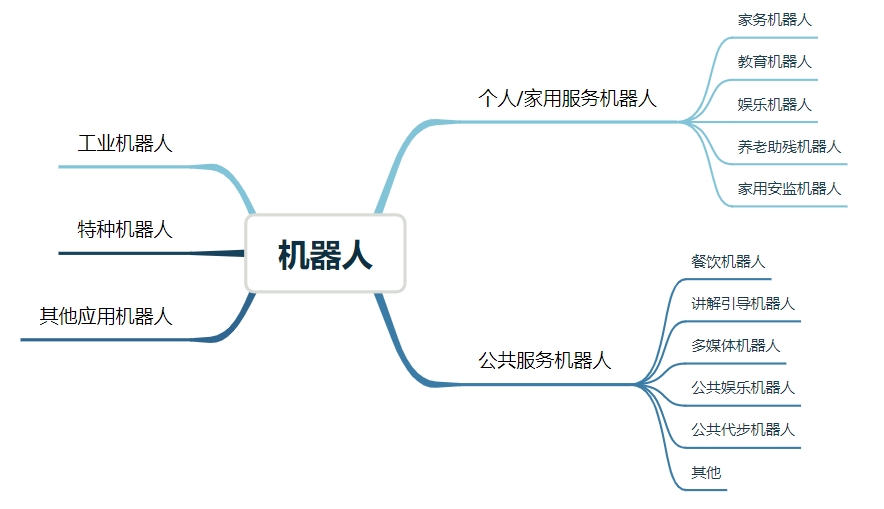
工业机器人:自动控制的、可重复编程、多用途的操作机,可对三个或者三个以上轴进行编程,它可以是固定式或移动式,在工业自动化中使用。如:搬运机器人、焊接机器人、喷涂机器人、加工机器人、装配机器人等。
特种机器人:指那些设计用于执行特定任务,并在特殊环境或条件下工作的机器人,它们通常具有针对性强、技术复杂度高、适应环境独特等特点,不局限于工业生产领域,而是广泛应用于非制造业和特殊应用场景中。如:搜救机器人、侦察机器人、排爆机器人、手术机器人、水下作业机器人、极限作业机器人等。
运动方式分类 根据机器人的运动方式,机器人可分为轮式机器人、足腿式机器人、履带式机器人、蠕动式机器人、飞行式机器人、浮游式机器人、潜游式机器人和其他运动方式机器人。 轮式机器人(wheeled robot):利用轮子实现移动的移动机器人。轮式机器人按其驱动方式可分为:双轮、三轮、全方位驱动机器人和其他轮式机器人。 履带式机器人(crawler robot; tracked robot):利用履带实现移动的移动机器人。履带式机器人按其驱动履带及关节数量可分为:单节双履带、双节双履带、多节多履带机器人和其他履带式机器人。 蠕动式机器人(squirming robot):利用自身蠕动装置实现移动的机器人。蠕动式机器人按其移动方向可分为:上下蠕动机器人、左右蠕动机器人、其他蠕动式机器人。 浮游式机器人(floating robot),亦称水面机器人:利用自身的推进装置在水面上实现移动的移动机器人。浮游式机器人按其推进方式可分为:螺旋桨浮游机器人、平旋推进浮游机器人、喷水浮游机器人、喷气浮游机器人、其他浮游式机器人。 专业分类法 专业分类法一般是机器人设计、制造和使用厂家技术人员所使用的分类方法,其专业性较强。目前,可按机器人控制系统的技术水平、机械结构形态和运动控制方式进行分类。 其中以关节型机器人为常用。不同形态机器人在外观、机械结构、控制要求、工作空间等方面均有较大的区别。例如,关节型机器人的动作类似人类手臂,而直角坐标及并联型机器人的外形和结构则与数控机床十分类似等。 (3)按运动控制方式分类。根据机器人的运动控制方式,可分为顺序控制型、轨迹控制型、远程控制型、智能控制型等。 轨迹控制型机器人需要同时控制移动轨迹、移动速度和运动终点,它可用于焊接、喷漆等连续移动作业。 远程控制型机器人可实现无线遥控,如军事机器人、空间机器人、水下机器人等。 智能控制型机器人就是前述的第三代机器人,多用于军事、场地、医疗等行业。




其他分类方式 机器人常见的分类方式,还包括但不限于以下几种: 使用空间分类:根据机器人的使用空间,机器人可分为地面/地下机器人、水面/水下机器人、空中机器人、空间机器人和其他使用空间机器人。 编程和控制方式分类:根据机器人的编程和控制方式,机器人可分为编程型机器人、主从机器人和协作机器人。 感知分类:根据机器人的感知能力,可以分为具有视觉、听觉、触觉、味觉、嗅觉等感知能力的机器人。 尺寸分类:根据机器人的尺寸大小,可以分为微型机器人、小型机器人、中型机器人和大型机器人等。 这些分类方式并不是互斥的,一个机器人可能会同时属于多个分类。随着技术的发展,机器人的分类方式也在不断演变和细化。这些分类方式可以帮助我们更好地理解和研究不同类型的机器人及其应用领域。



