

2024.08.08
朴津行业应用 | 能说会导,智慧引导服务方案





近期,“萝卜快跑”相信大家都有所耳闻,甚至已经体验上了。号称L4级别自动驾驶网约车“萝卜快跑”在社交媒体大火,让曾经只存在于科幻电影中的无人驾驶汽车,驶入了武汉市民的日常生活中,更成为了自动驾驶技术商业化进程中的重要里程碑。那么萝卜快跑的L4级别自动驾驶到底意味着什么?面对各大厂家和媒体经常宣传的自动驾驶L2、L3、L4.....想必很多人还是听得一头雾水。到底自动驾驶有哪些等级?又是如何区分的呢?今天我们就一起了解下驾驶自动化的等级划分。
简单来说,自动驾驶就是车辆能够接管或辅助驾驶员完成驾驶任务,从而减少人为操作的需求,提高驾驶的便捷性和安全性。全球汽车行业所公认的汽车自动驾驶技术分级标准是由国际汽车工程师学会(SAE)提出的。当前全球广泛采用的也是由SAE制定的划分方法,按照分级标准,其中的自动驾驶L0-L5的意思是指自动驾驶技术水平从0级至5级递增,总共有6个等级。
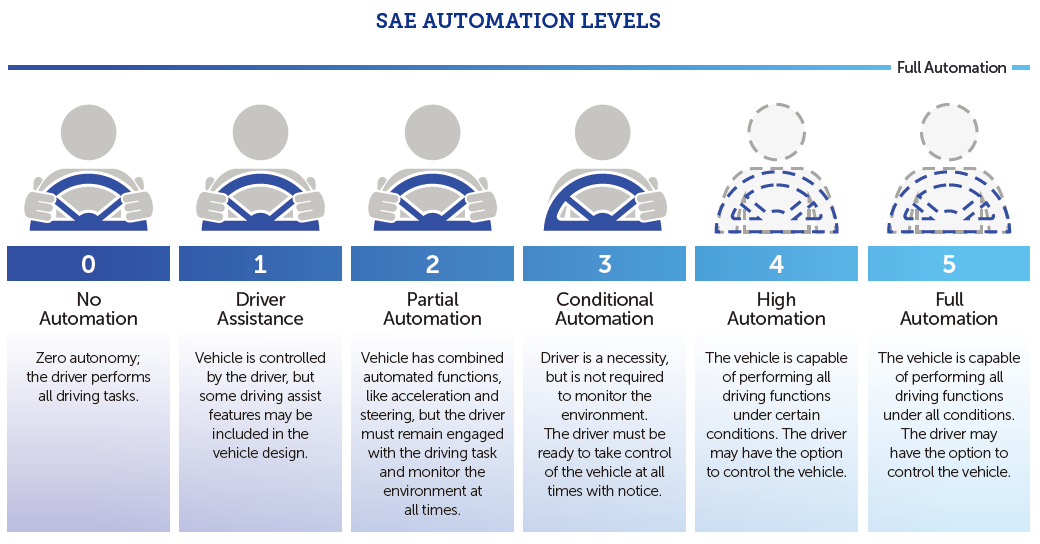
L0级 无自动驾驶
L1级 辅助驾驶
L2级 部分自动驾驶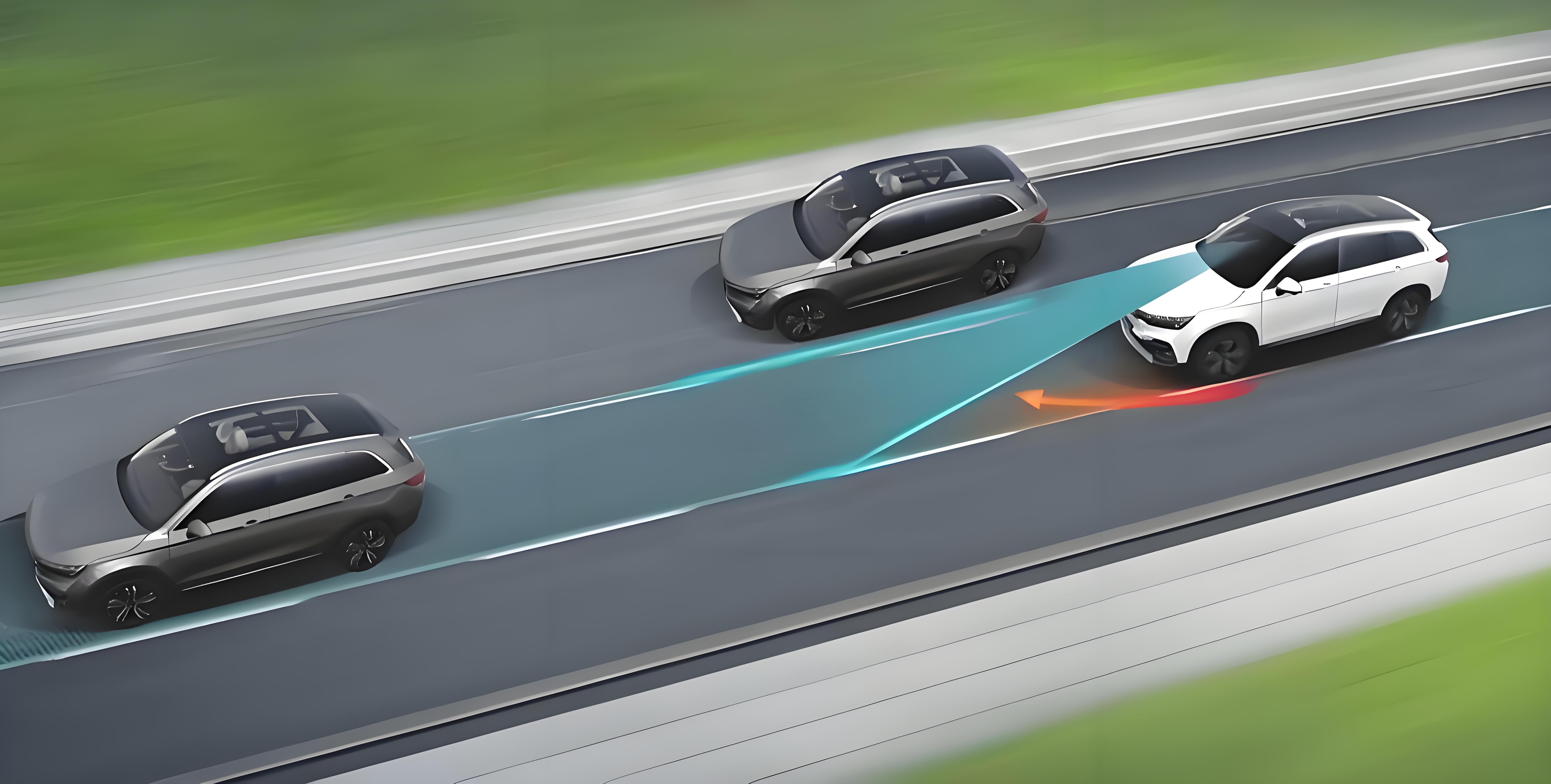
L3级 有条件的自动驾驶 人车分工:驾驶员20%,车80% 有条件的自动驾驶,即系统在满足设计运行条件时,可以执行全部动态驾驶任务,包括对环境的感知、方向盘和加减速控制。当设计运行条件即将不满足时,系统会请求人类用户接管。这意味着在特定场景下,如高速公路或早晚高峰等特殊场景,车辆可以完全自动操作,驾驶员可以双手、双脚甚至眼睛都不进行操作,但需要随时关注路况信息,以防汽车行车系统因遇到无法识别的路况而不知如何处理。 L2到L3从技术上讲是一个实质性的跳跃,但是从驾驶员的角度来讲变化并不明显。L3级别的汽车有环境感知的能力,能够根据环境感知做出更明智的决策,例如加速超过一台低速汽车。但是,它仍需要驾驶员可以随时掌控,驾驶员必须时刻保持警惕并做好自动驾驶系统失效重新掌控汽车的准备。 L4级 高度自动驾驶 人车分工:车100% 高度自动化。特定区域内,整个驾驶过程的所有操作由车单独完成,驾驶员不承担驾驶任务,可以完全转移注意力。但驾驶员依旧需要充当安全员的角色,监管自动驾驶系统的驾驶行为,可以主动选择接管车辆。如果超出这些特定区域,驾驶员可能需要对车辆进行接管控制。 L4级自动驾驶,车辆需要通过多种传感器(如激光雷达、毫米波雷达、摄像头等)对周围环境进行全面感知。这些传感器需要协调工作,提供高分辨率的环境数据,并将这些数据深度融合到一个统一的模型中。 萝卜快跑宣称所使用的自动驾驶技术为L4级,即在限定区域内无需人类干预即可完成驾驶任务。值得注意的是L4级别仍然受到地理和环境的限制,与L5完全自动驾驶不同。 L4级别的车辆可在自动驾驶模式下运行。但在法律和基础设施发展之前,他们只能在一个有限的区域内(通常是最高时速平均达到30英里的城市环境)这样做。这就是所谓的地理围栏。 值得一提的是朴津智能高级别驾驶多功能车平台,搭载的高级别自动驾驶系统可以在满足设计运行域的城市道路、园区道路上实现全自动驾驶功能,无需人员干预的驾驶体验。通过控制转向、制动、驱动、挡位、灯光等在限定区域来实现高度自动驾驶。可以灵活地部署在各种封闭或半封闭的交通场景中,全天候实现流畅稳定自动行驶,满足不同场景需求。 L5级 完全自动驾驶 人车分工:车100% 完全自动化。车辆能够在任何地理区域和路况下,以及任何时间点,完全自主地执行所有驾驶任务,不需要人员干预。驾驶员甚至不需要在车辆内,车辆可以在完全无人的情况下运行。 L5级别的自动驾驶汽车“动态驾驶任务”被取消了,不需要驾驶员任何形式的介入。L5级别的汽车甚至没有方向盘或加速/刹车踏板。它们将摆脱地理围栏,能够去任何地方,做任何有经验的人类驾驶员能做的事情。 L5级自动驾驶面临的技术挑战主要包括多场景叠加、非理想环境适应以及交通状态不确定等问题。例如如何在城市闹区等多交通场景叠加的情况下安全行驶;在动态变化的天气与路况条件下如何稳定运行;以及面对随机突发的紧急事件如何快速做出反应。 虽然目前已经出现了无人驾驶汽车,但完全成熟的无人驾驶汽车不会很快就全面普及,依然困难重重。全面普及无人驾驶需要建立适应性强、全面而一致的法律和法规框架。这些法规应涵盖无人驾驶车辆的技术标准、责任和保险要求,以及与其他交通参与者的互动规则等方面。




